Percutaneous liver biopsy is the gold standard to confirm a liver disease diagnosis and to guide subsequent therapy. Ultrasound image guided liver biopsies are being used to reduce the procedural risks but post-biopsy complications persist. The major and most common complication of liver biopsy is hemorrhage, which remains a highly unpredictable complication. Post biopsy observation by specially trained nurses and surgical intervention make liver biopsy a costly procedure for health care delivery systems in addition to patient anxiety. Invasive hemostatic techniques are complicated and expensive. Non-invasive hemostatic methods include electro-cautery, microwave, lasers, radio frequency, argon-beam, and High Intensity Focused Ultrasound (HIFU). All the noninvasive methods except HIFU require exposure of the site of liver puncture for hemostasis. HIFU is an ultrasound modality, i.e. uses mechanical sound waves, and is minimally affected by tissue attenuation. Because HIFU can deliver energy to targets deep within the body, it is the best choice for hemostasis in this context. Because manual focus of HIFU is difficult, we developed a robotic system for both automated liver biopsy and HIFU hemostasis.
Commercially available image-guided biopsy tools are manual. The needle guide attachment fixes the angle of needle insertion. The operator holds the ultrasound transducer with an attached biopsy needle guide in one hand; examines the biopsy target region and selects an appropriate biopsy needle trajectory. The operator inserts the biopsy needle with the other hand through the needle guide, advancing to the target, and collects the sample. In a manual system, a second person might attempt to hold and focus a HIFU unit on the punctured liver surface, but this is difficult and highly error-prone. Hence automating the position of all three elements (Ultrasound transducer, Biopsy needle and HIFU transducer) will allow a single operator to perform the procedure with greater accuracy. We expect procedural automation to increase accuracy, shorten procedural time, and minimize discomfort; improving the reliability of hemostasis reduces the costs to patient and provider alike.
Prototype Description
The prototype system has an on board computer (OBC), a touch-enabled LCD monitor and a robotic biopsy system (Hemobot) on an adjustable arm as shown in Figure 1. The OBC controls the robot and accepts inputs (through keyboard, mouse and a joystick) from the operator. It captures B-scan images from the video output of a standard diagnostic ultrasound system. The B-scan image is thus displayed simultaneously on the Hemobot and the ultrasound system. The Hemobot provides a graphic user interface (GUI) for the operator to control the procedure.
The Hemobot has three main elements; ultrasound transducer, Biopsy needle, and the HIFU (Figure 2a). A set of three C arms, holding the main elements, position them precisely as required. The HIFU focal point is mechanically fixed in the plane of the biopsy needle trajectory. The linear stages control the depth of needle penetration and the HIFU focal point at the site of liver puncture. The C arms are controlled by an operator joystick.
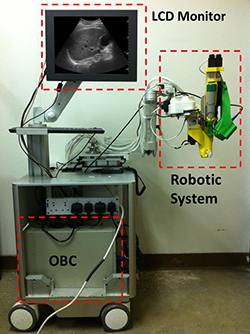
Figure 1. Shows HEMOBOT with the robotic system on the portable cart (Developed in collaboration with RIT’s Center for Applied science and technology)
Advantages of Robotic Biopsy with HIFU
- Better patient outcome and satisfaction.
- Usage of HIFU ensures the arrest of Hemorrhage, permitting patients with coagulation disorders to under biopsy.
- Minimizes post biopsy care and patient anxiety, cutting the operation costs.
- Accurate targeting and physician friendly.